Robot OTTO
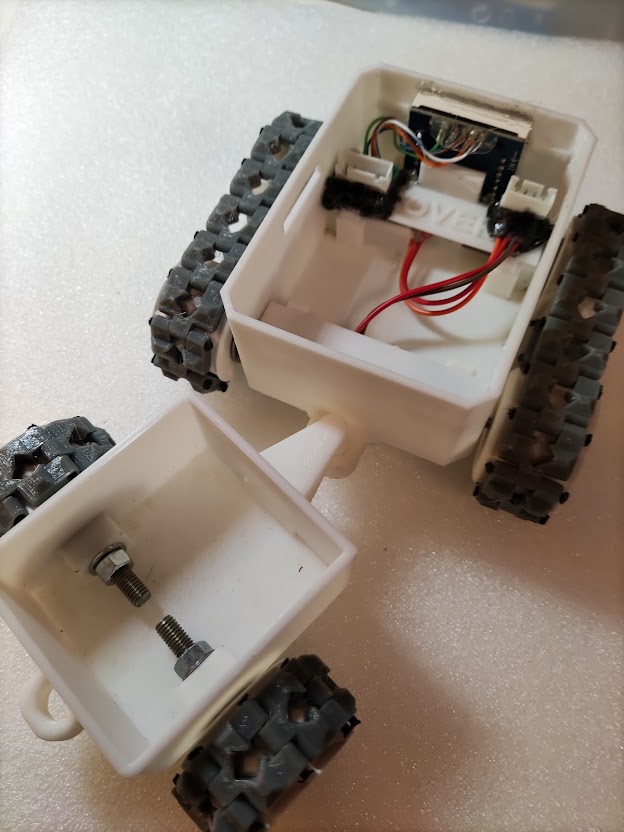
Ce projet de robotique s'appuie sur une version spécifique de l'écosystème OTTO, utilisant une propulsion par chenilles. La structure, intégralement imprimée en 3D, intègre un système de chaînes réalisées en TPU (filament flexible), offrant une excellente adhérence et une capacité de franchissement sur différents sols grâce à la souplesse du matériau.
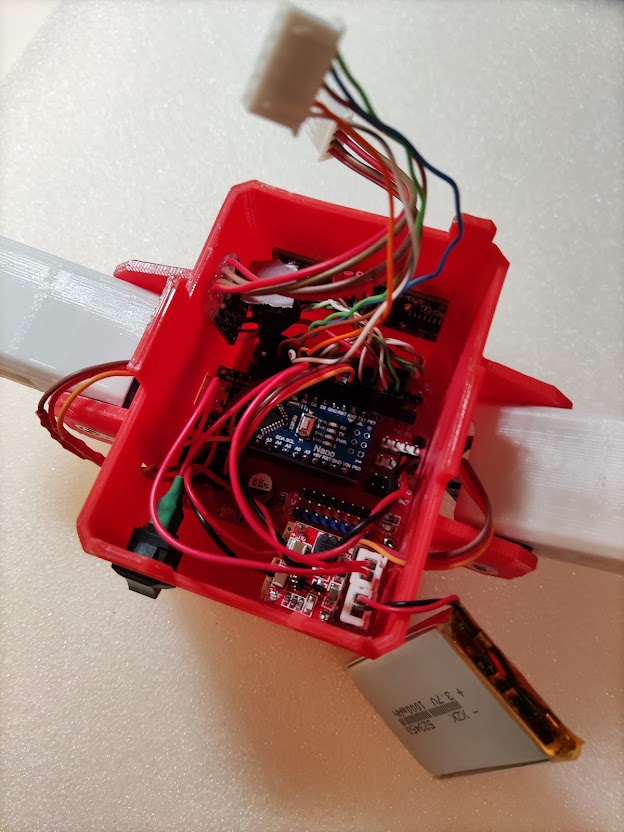
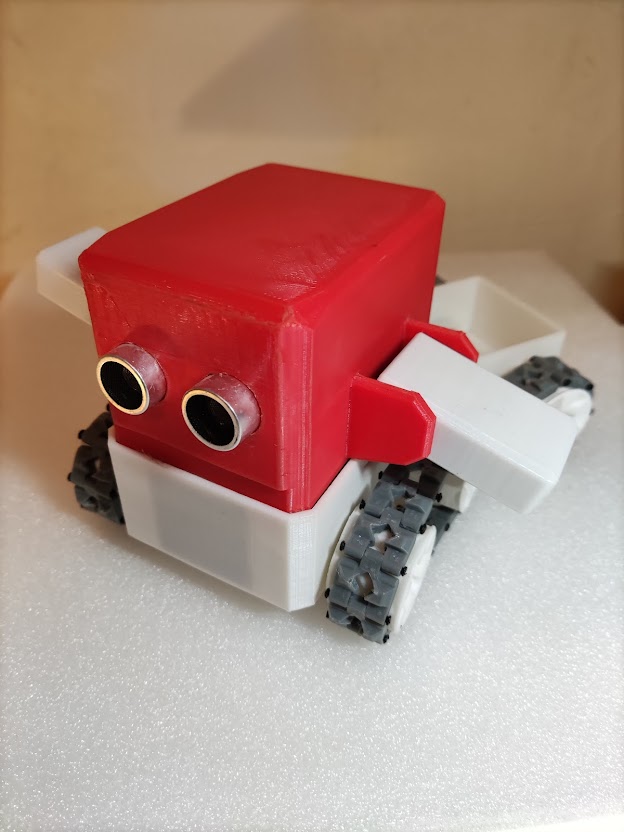
Le robot est piloté par un Arduino qui coordonne les mouvements et les interactions. Il embarque un capteur ultrasonique pour l'évitement d'obstacles et un écran LED frontal (matrice 8x8) pour afficher des expressions animées. Pour renforcer son aspect interactif, j'ai ajouté deux bras articulés par des servomoteurs, permettant d'animer le robot lors de ses déplacements. C’est un montage technique complet qui combine mécanique mobile, électronique et animation robotique.
Ce projet de robotique s'appuie sur une version spécifique de l'écosystème OTTO, utilisant une propulsion par chenilles. La structure, intégralement imprimée en 3D, intègre un système de chaînes réalisées en TPU (filament flexible), offrant une excellente adhérence et une capacité de franchissement sur différents sols grâce à la souplesse du matériau.
Le robot est piloté par un Arduino qui coordonne les mouvements et les interactions. Il embarque un capteur ultrasonique pour l'évitement d'obstacles et un écran LED frontal (matrice 8x8) pour afficher des expressions animées. Pour renforcer son aspect interactif, j'ai ajouté deux bras articulés par des servomoteurs, permettant d'animer le robot lors de ses déplacements. C’est un montage technique complet qui combine mécanique mobile, électronique et animation robotique.